 |
 |
 
|
 |
Partners











|
 
Progetto finanziato
con il contributo della Comunità Europea
Modulo precedente - Modulo successivo Pannelli Fotovoltaici: metodi per tracciare punti di massima potenzaN. Femia, G. Petrone, G. Spagnuolo, DIIIE, Università di
Salerno
M. Vitelli, DII, Seconda Università di Napoli
Sommario Lo scopo di questo capitolo è di introdurre il concetto di (MPPT) tracciare punti di massima potenza di fonti di energia fotovoltaica. Le principali tecniche inerenti tale questione saranno brevemente presentate. Esse sono esaminate per mettere in evidenza vantaggi e conseguenze di ognuno di loro.
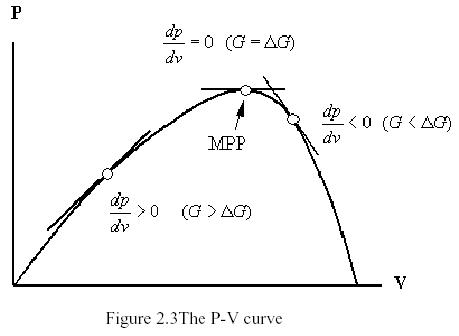
Tracciare la potenza massima da un pannello fotovoltaico Un insieme fotovoltaico sotto irradiazione continua mostra un unico punto (corrente-voltaggio) di massima potenza, che indica la sua massima potenza in uscita (Liu 2002) Nella fig. 1 è mostrato un esempio di pannello fotovoltaico con le caratteristiche della corrente rispetto al voltaggio per tre livelli di irradiazione. E stato evidenziato anche il punto (MPP) in entrambe le figure. a) b) Figura 1. Caratteristiche di due pannelli solari con tre livelli di irradiazione S e due temperature diverse: a) potenza di uscita rispetto al voltaggio b) corrente rispetto al voltaggio Come evidenziato nella figura 1. le caratteristiche I-V di un insieme fotovoltaico e il suo MPP, cambia come conseguenza della variazione del livello di irradiazione e della temperatura del pannello che è in funzione del livello di irradiazione della temperatura dellambiente, dellefficienza del meccanismo di scambio di calore e del punto operativo del pannello(Liu 2002) Tale effetto è descritto bene dalle applicazioni del linguaggio Java. Di conseguenza se un insieme fotovoltaico carica a stento un impianto di corrente continua o una batteria, chiaramente opera a un voltaggio fisso, lenergia estrapolata da esso è spesso sensibilmente inferiore al massimo che dovrebbe essere capace di produrre se operasse ad un voltaggio corrispondente allMPP. Da qui è necessario tracciare continuamente lMPP per poter massimizzare la potenza in uscita di un sistema di PV per un determinato utilizzo. Il convertitore dc/dc (penso ac/dc?) ha di solito questo compito: labbinamento sorgente/carica che non assicura il trasferimento della potenza massima alla carica a qualsiasi livello di irradiazione e temperatura, viene integrato da un convertitore interposto tra la fonte e la carica per regolarne lerogazione di voltaggio tracciando lMPP. Il punto di massima potenza (MPPT) è stato utilizzato in diverse applicazioni: sono stati proposti esempi di confusione logica, reticolo neurale, cellule sperimentali e implementazioni basate su DSP (Hohm 2000). Tuttavia le tecniche (P&O) perturbazione ed osservazione e (INC) conduttanza incrementale sono largamente usate soprattutto nelle implementazioni a basso costo. Nella sequenza questi due approcci all MPPT sono brevemente descritti per sottolineare le loro differenze i loro vantaggi e svantaggi. La tecnica di conduttanza incrementaleLalgoritmo INC è basato sullosservazione che ad MPP quando il punto operativo del piano V P è sulla destra dellMPP, allora
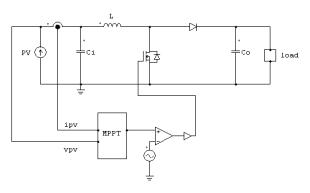
Uno svantaggio dellalgoritmo INC è nelle sue richieste nei termini di complessità di hardware e di software. Lalgoritmo di perturbazione e di osservazione (P&O) Lalgoritmo P&O MPPT è largamente usato, dovuto alla sua facilità di implementazione. Si basa sul seguente criterio se il voltaggio operativo del P-V è alterato in una certa direzione e se la potenza prodotta dal pannello aumenta, questo significa che il punto essenziale si è mosso verso lMPP e quindi il voltaggio operativo deve essere ulteriormente alterato nella stessa direzione altrimenti se la potenza prodotta dal pannello diminuisce, il punto essenziale viene spostato dallMPP e quindi la direzione della alterazione del voltaggio operativo deve essere invertita. Uninconveniente della tecnica P&O MPPT è che in stato di immobilità il punto operativo oscilla intorno allMPP causando la perdita di una certa quantità di energia disponibile. Alcuni miglioramenti dellalgoritmo P&O sono stati suggeriti per poter ridurre il numero delle oscillazioni intorno allMPP nello stato di immobilità, ma essi rallentano la velocità della risposta dellalgoritmo e causano quindi il cambiamento delle condizioni atmosferiche e diminuiscono lefficienza dellalgoritmo durante le giornate nuvolose. Sia i metodi P&O e INC possono essere confusi durante questi intervalli di tempo caratterizzati da cambiamenti di condizioni atmosferiche, perché durante tali intervalli il punto essenziale può spostarsi dallMPP invece di essere vicino ad esso. Questo inconveniente viene mostrato nella figura 2 dove è riportata per la linea del punto operativo P&O MPPT per una variazione dellirradiazione da 200W/m2 a 800W/m2. a) b) Figura 2. linea del punto operativo P&O MPPT. Lasterisco rappresenta MPP per diversi livelli di irradiazione: a) lento cambiamento delle condizioni atmosferiche; b) rapido cambiamento delle condizioni atmosferiche. Lesempio riporta i due diversi comportamenti sul piano delluscita di potenza rispetto al voltaggio: Fig. 2 a) mostra la linea del punto operativo in presenza di lenti cambiamenti atmosferici Fig 2 b) mostra invece la mancanza del controllo MPPT per seguire lMPP quando è in corso un rapido cambiamento delle condizioni atmosferiche. Anche il controllo dellINC MPPT presenta tale comportamento. Non si è generalmente daccordo su quale dei due metodi sia il migliore, anche se viene spesso detto che lefficienza - espressa come proporzione tra lenergia in uscita del pannello e la massima energia che il pannello può produrre con la stessa temperatura e livello di irradiamento dellalgoritmo INC - è maggiore dellalgoritmo P&O. A questo punto è importante dire che i paragoni presentati in questo studio sono portati avanti senza una vera ottimizzazione dei parametri P&O. Ad Hohm 2000 è stato dimostrato che il metodo P&O quando è propriamente ottimizzato, conduce ad un efficienza che è simile a quella che si può ottenere dal metodo INC. Questi spesso sono scelti soltanto sulla base di prove e di errori di test. Sfortunatamente nessuna linea generale o regola può determinare i valori ottimali dei parametri P&O. Paper (Femia 2005) cercò di colmare questo vuoto, fu sviluppata unanalisi teorica che permetteva la scelta ottimale dei due principali parametri che caratterizzavano lalgoritmo P&O. lidea chiave che sottolineava lapproccio dellottimizzazione proposta fu quella di adattare i parametri di P&O ed MPPT al comportamento dinamico dellintero sistema composto da un convertitore specifico e da un pannello PV adottato. I risultati ottenuti attraverso tale approccio mostrano chiaramente che nei regolatori di MPPT efficienti, la facilità e la flessibilità della tecnica di controllo P&O e MPPT può essere sfruttata ottimizzandoli secondo la dinamica specifica del sistema. Come esempio viene esaminato il convertitore di corrente nella fig. 3 I risultati ottenuti e le considerazioni che sono state qui illustrate possono essere estese ad ogni altra tipologia di convertitori
(a) (b) Fig. 3 convertitore di corrente con controllo MPPT a) circuito semplificato b) blocco di diagramma equivalente Il sistema nella figura 3. può essere schematicamente rappresentato come nella figura 3.(b) dove d è il ciclo stabilito e p è la potenza tratta dal pannello PV. Qui di seguito lesempio di intervallo sarà indicato con Ta, e lampiezza della perturbazione del ciclo stabilito con Dd=|d(kTa)-d((k-1)Ta)|>0. Nellalgoritmo P&O il segno della perturbazione del ciclo stabilito a (k+1)viene deciso sulla base del segno della differenza tra la potenza p((k+1)Ta) e la potenza p(kTa) secondo quanto discusso in precedenza: d((k+1)Ta)=d(kTa)+(d(kTa)-d((k-1)Ta))×sign(p((k+1)Ta)-p(kTa)) (1) Lampiezza della perturbazione del ciclo stabilito è una dei due parametri richiesti per lottimizzazione. Diminuendo D d si riduce la perdita di stabilità causata dalloscillazione del punto operativo del sistema intorno allMPP, comunque esso rende lalgoritmo meno efficiente in caso di rapido cambiamento di condizione atmosferica. La scelta ottimale di D d in queste situazioni, quando dobbiamo tener presente le dinamiche sia della fonte che del convertitore è stata discussa dettagliatamente a Femia 2005. Oltre al caso della variazione veloce dell MPPT che si ha soltanto nei giorni nuvolosi, cè anche un problema più generale connesso alla scelta dellintervallo Ta campione usato dallalgoritmo P&O ed MPPT, che sorge perfino nei giorni di sole splendente, quando lMPP si muove molto lentamente. Il campione dellintervallo Ta dovrebbe essere regolato più alto per evitare linstabilità dellalgoritmo MPPT e per ridurre il numero di oscillazioni intorno allMPP in uno stato di stabilità. Infatti considerando un pannello MPP con un PV fisso se lalgoritmo esamina il voltaggio e la corrente del pannello troppo velocemente, è soggetto a possibili errori causati da un rapido passaggio del sistema (pannello PV + convertitore), quindi perdendo, anche se temporaneamente, la corrente MPP del pannello PV, che si trova nella fase di stabilità. Di conseguenza lefficienza dellenergia decade siccome lalgoritmo può essere confuso ed il punto operativo può essere instabile causando disordini. Per evitare ciò deve essere assicurato che dopo ogni perturbazione di ciclo stabilito, il sistema raggiunga lo stato di stabilità prima che la successiva misura del voltaggio e della corrente del pannello venga effettuata. A Femia 2005 il problema di scegliere Ta è stato considerato una soluzione ottimale. Il procedimento di ottimizzazione viene illustrato per rapide e mutevoli condizioni di irradiamento e sono state ampiamente sperimentate simulazioni di risultati. RiferimentiN.Femia, G.Petrone, G.Spagnuolo, M.Vitelli (2005), Optimization of Perturb and Observe Maximum Power Point Tracking Method, IEEE Transactions on Power Electronics, Vol.20, N.4, July 2005, pp.963-973. D.P.Hohm, M.E.Ropp (2000): Comparative Study of Maximum Power Point Tracking Algorithms, Conference Record of the Twenty-Eighth IEEE Photovoltaic Specialists Conference, September 2000, pp.1699-1702. S. Liu, R. A. Dougal (2002), Dynamic multiphysics model for solar array, IEEE Trans. On Energy Conversion, Vol. 17, No. 2, June 2002, pp. 285-294. |
 |
|
|
 |





